Расскажите о вашем роботе. Какие функции он выполняет?
Это микро-ТНПА — телеуправляемый необитаемый подводный аппарат. Его основная цель — обследование труб на кораблях.
Сначала робота подводят к трубе и запускают внутрь неё при помощи манипулятора. Далее он проводит осмотр и при помощи установленной камеры выводит увиденное на экран ноутбука. А там уже программа в автоматизированном режиме определяет повреждения и степень коррозии судна.
Такой робот будет полезен не только компаниям, занимающимся перевозками по воде, но и коммунальным предприятиям — ведь им тоже нужно отслеживать состояние труб.
Вау! А как он устроен? За счёт чего может работать под водой?
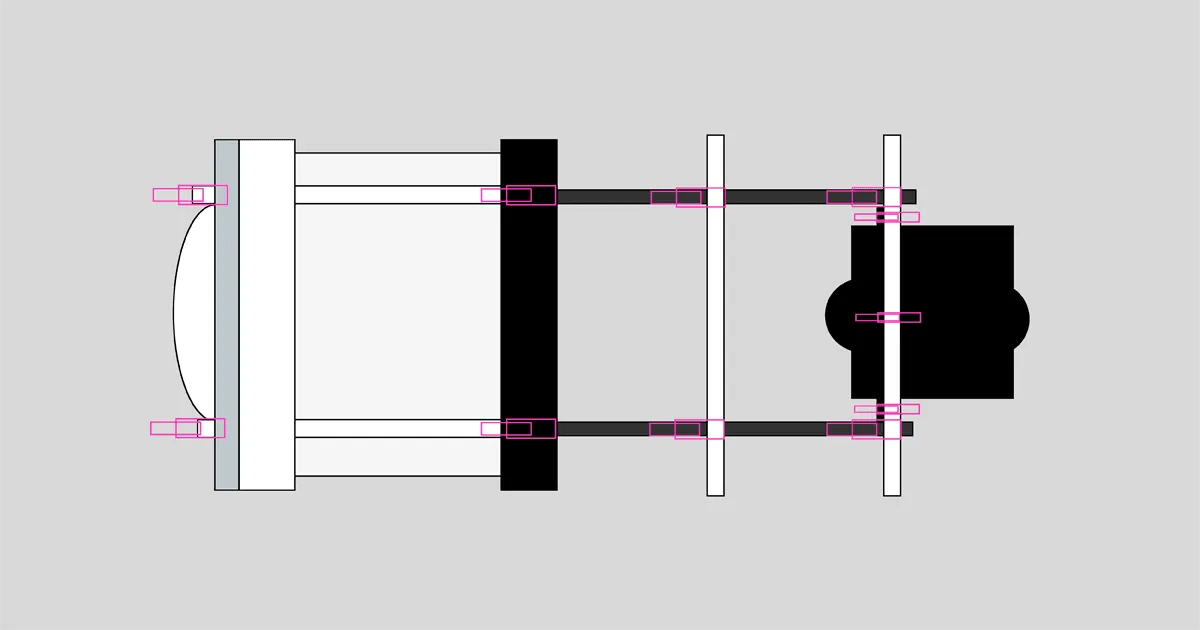
Герметичность корпуса обеспечивают уплотнительные кольца — важно не только правильно их поставить, но и контролировать их чистоту. А стержни по бокам сжимают корпус и плотно прижимают эти кольца к конструкции.
Определение поломок в трубе происходит за счёт компьютерного зрения. Организаторы предоставили табличку с фигурами — их нужно было распознать и сгруппировать, чтобы на компьютере отображались не только сами повреждения, но и их тип и общее найденное количество.
Арсений: Распознавание объектов и их визуализация работают с помощью библиотеки OpenCV. Для распознавания дыр я использовал модель YOLO11. Я подготовил набор данных примерно из 100 фотографий, разметил, где на них находятся дыры, потом поставил нейросеть на обучение — и спустя 5 минут получилась модель, которую я применял на олимпиаде.